A Bayesian Modeling Framework for Estimation and Ground Segmentation of Cluttered Staircases
Prasanna Sriganesh, Burhanunddin Shirose and Matthew Travers
IEEE Robotics and Automation Letters (RA-L) 2025
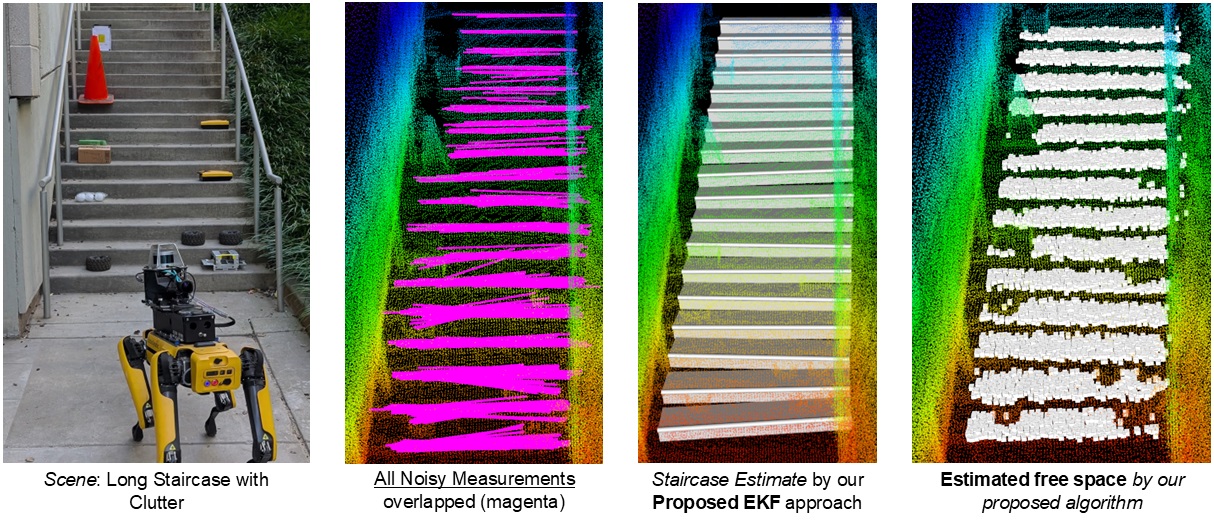
Autonomous robot navigation in complex environments requires robust perception as well as high-level scene understanding due to perceptual challenges, such as occlusions, and uncertainty introduced by robot movement. For example, a robot climbing a cluttered staircase can misinterpret clutter as a step, misrepresenting the state and compromising safety. This requires robust state estimation methods capable of inferring the underlying structure of the environment even from incomplete sensor data. In this paper, we introduce a novel method for robust state estimation of staircases. We have three key contributions.
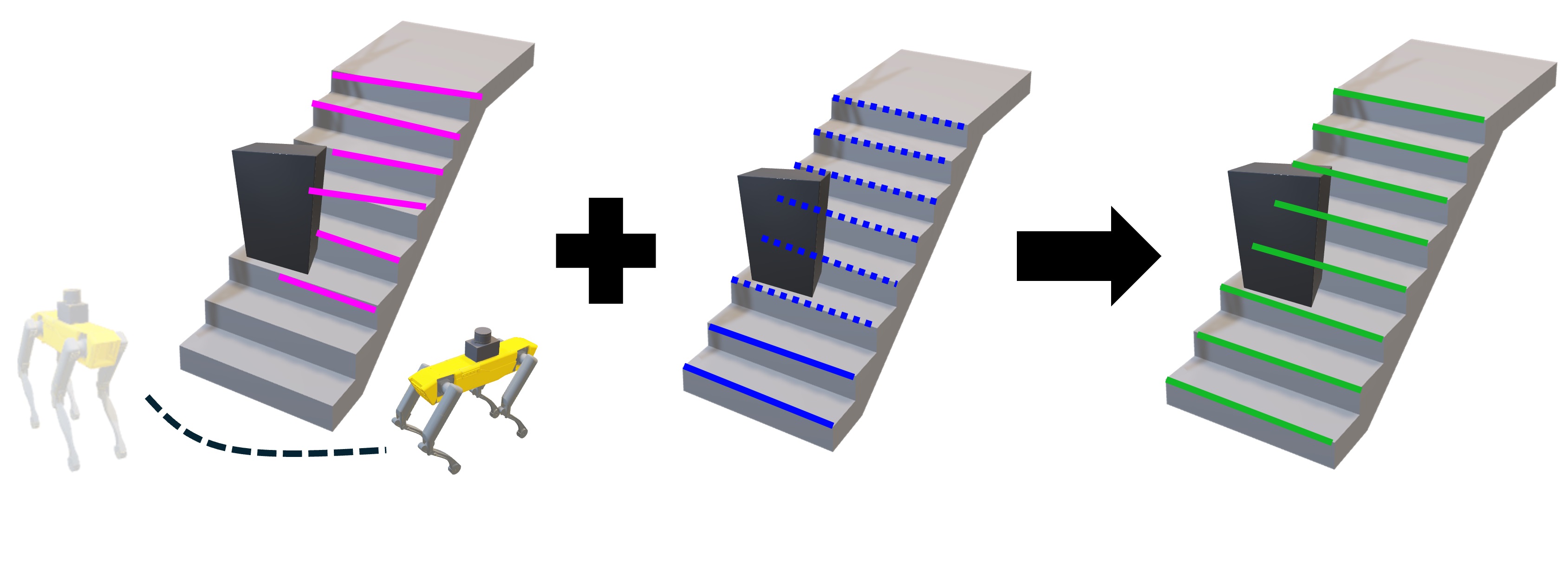
Staircase Modeling: We present a novel split state-space model to parameterize and represent large-scale staircases that can be used to predict other stairs in the staircase.
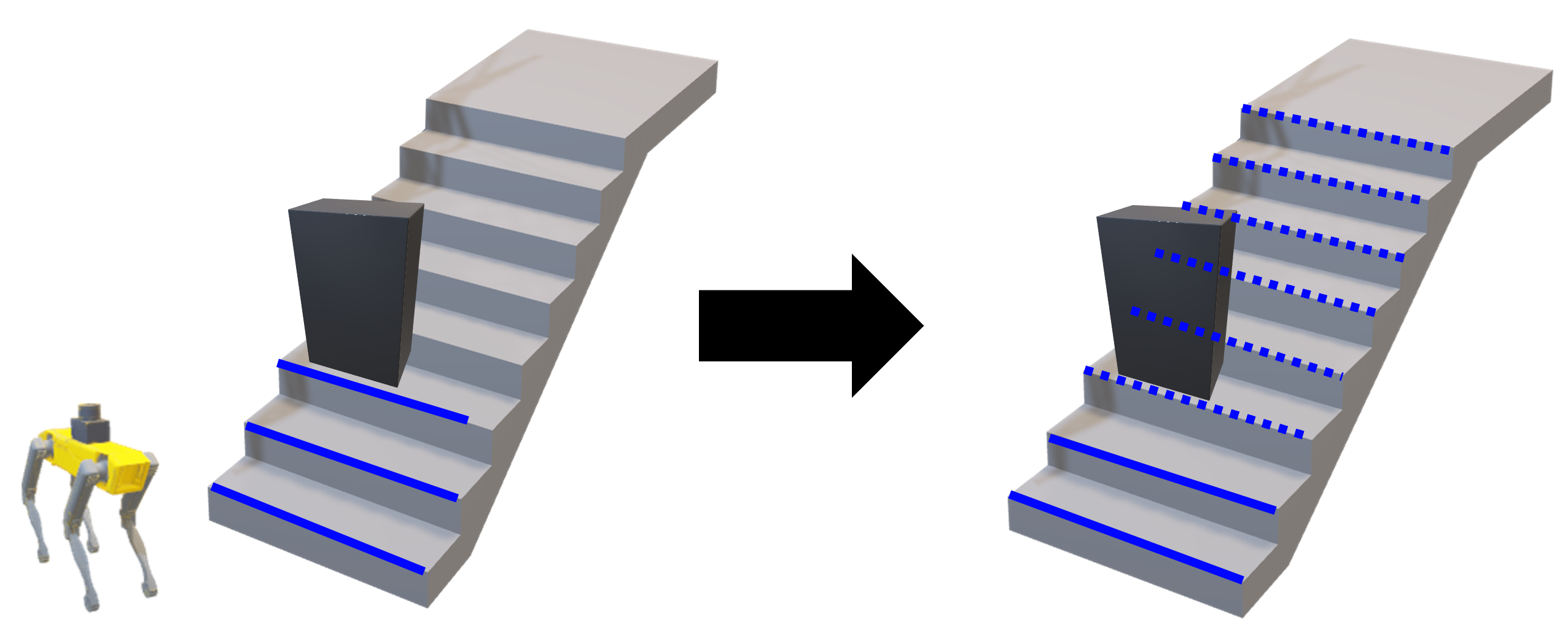
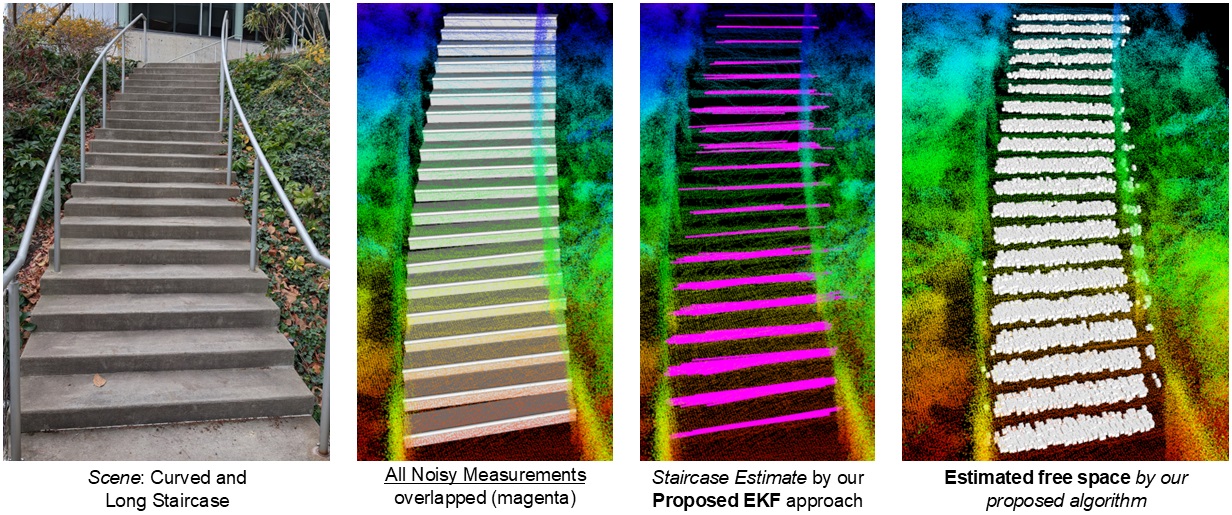
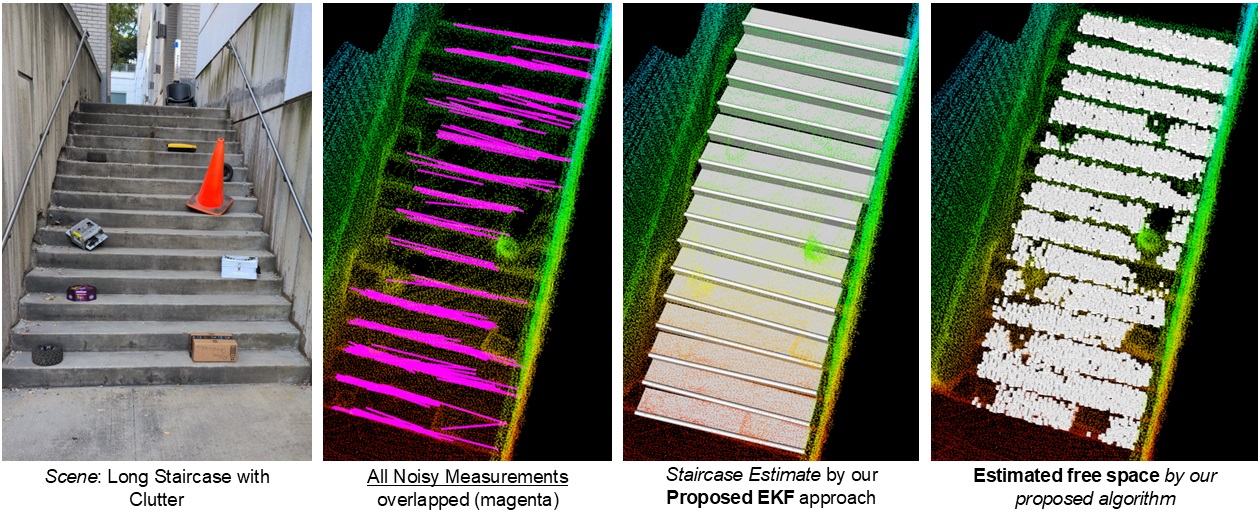
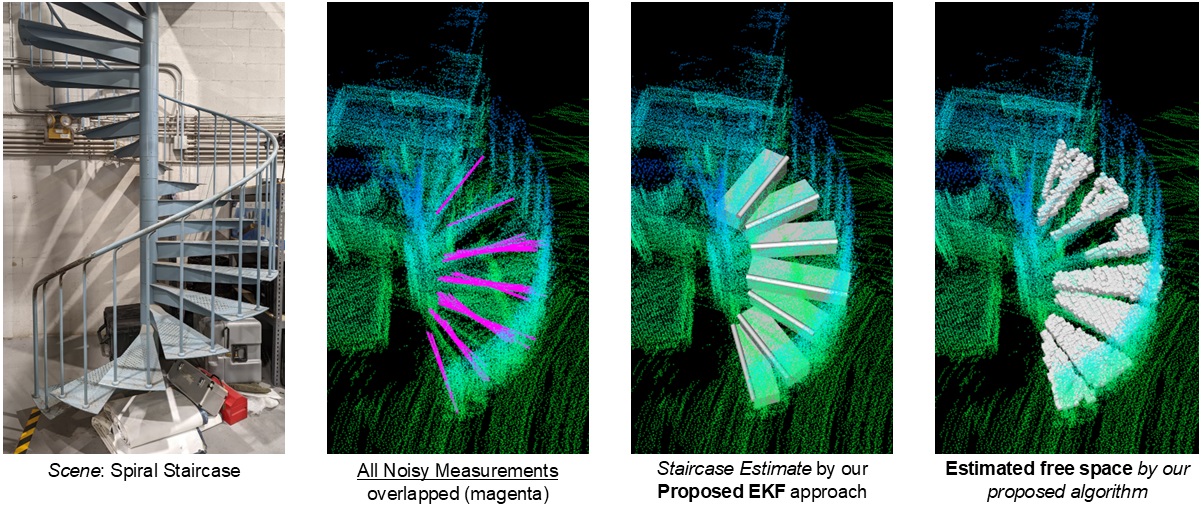
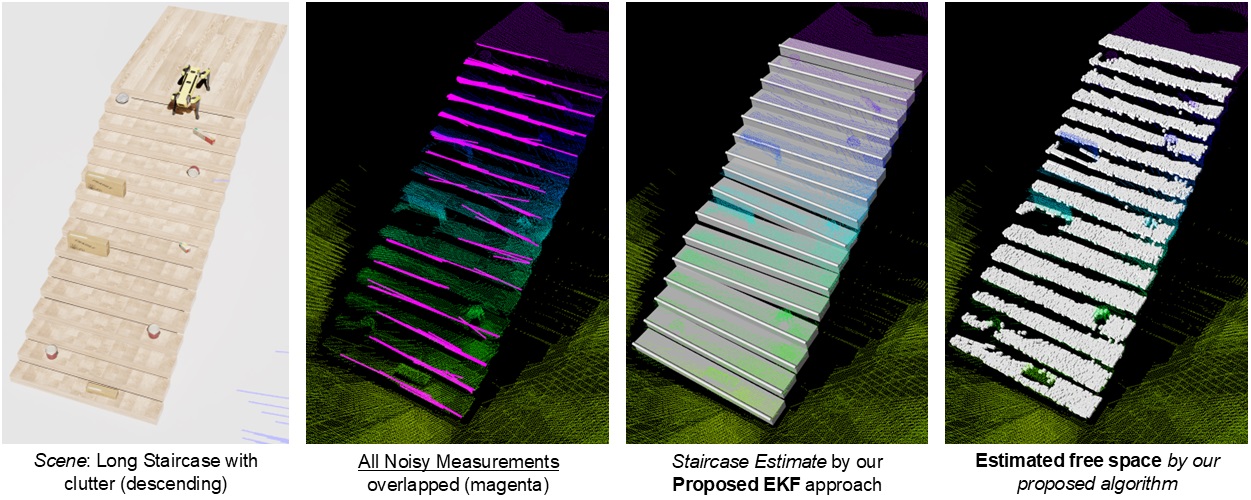
Staircase Estimation: A robust pipeline for estimating staircase location and parameters over time using noisy detections in scenes with occlusion and clutter
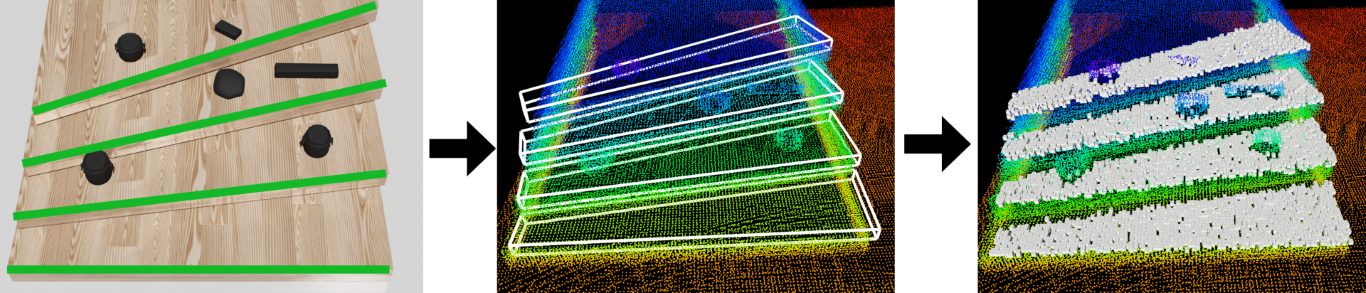
Stair Surface Segmentation: An algorithm combining the staircase estimate with the point cloud to segment the staircase ground points in presence of clutter
The video below demonstrates our proposed pipeline deployed on the robot different staircases with clutter. Our algorithm is able to estimate staircase location and geometry even in presence of occlusions or partial measurements.
Here are some more example results of our proposed work. Our algorithm generalizes to different types of staircase.
Citation:
@article{sriganesh2025bayesian,
title={A Bayesian Modeling Framework for Estimation and Ground Segmentation of Cluttered Staircases},
author={Sriganesh, Prasanna and Shirose, Burhanuddin and Travers, Matthew},
journal={IEEE Robotics and Automation Letters},
year={2025},
volume={10},
number={5},
pages={4164-4171},
publisher={IEEE}
}